TPMS车轮自动定位算法介绍(NXP)-3
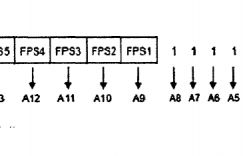
4.2移动路径与旋转周期之间的关系
旋转周期是指车轮执行完整旋转所需的时间。
这是车轮行驶距离等于[……]
继续阅读
TPMS芯片之英飞凌SP40PLUS的射频传输控制器
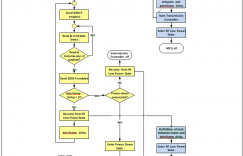
RF传输控制器是一个状态机(FSM),用于在没有CPU支持的情况下处理RF传输。
对于电报传输[……]
TPMS车轮自动定位算法介绍(NXP)-2
4计算旋转周期
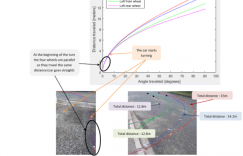
4.1四个车轮行驶的距离
当汽车转弯时,四个车轮在相同的时间内行驶不同的距离。因此[……]
新能源车主主要面临四个方面的大问题
目前新能源车主主要面临四个方面的大问题:一,车桩兼容性差,充不上电、一次性充电成功率低。二、充电桩不可靠,故障率大于1[……]
TPMS车轮自动定位算法介绍(NXP)-1
1导言
Kinetis车轮定位(KWL)软件模块由NXP使用Kinetis Design Studio集[……]
车载摄像头–ISP图像处理2
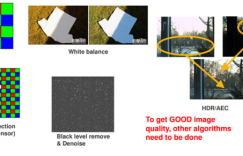
⑥ LSC(Lens Shade Correction)– 镜头阴影校正:
产生原因:通过镜头后,到达 Sensor[……]
车载摄像头–ISP图像处理1
ISP 全称 Image Signal Processor,即图像信号处理器,它把 Sensor 输出的 Raw 数据进行处[……]
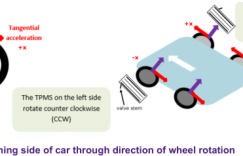
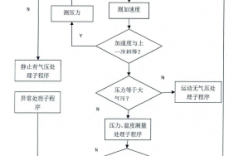
TPMS产品之–发射模块的工作模式
由于汽车在运动过程中加速度不可能绝对的相等,故可以通过对比前后两次监测的加速度值精确地判断车子状态。
如果两次[……]
飞思卡尔TPMS芯片之–载波探测模式
在MCU直接模式中,LFR检波器模块激活,软件可以直接监控来自检波器(通过LFDO状态位)数据。绕过解码器。软件可[……]
飞思卡尔TPMS芯片之–加密
加密
TPMS芯片中包含有用于防止非法访问Flash和RAM存储器内容的电路。启用了加密之后,Flash和RAM被看[……]
飞思卡尔TPMS芯片之–主动后台模式
模式:
飞思卡尔TPMS芯片之– 加速度测量
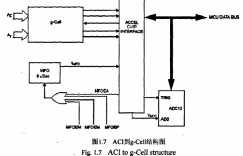
加速度测量
加速度测量包含一个模拟接口(ACI)与加速度传感单元连接,参见下图1.7。MCU上的控制位运行A[……]
SNP739 TPMS芯片之– 存储器2
固定RAM(XRAM)
为了在设备处于低功耗状态或热关机时保存信息,有128字节的保留RAM可用。保留R[……]