TPMS车轮自动定位算法介绍(NXP)-4
4.3增强轮换周期差异的参数
有两个参数会影响旋转周期之间的相对差异。
•转向角(可变)
•轨道与轴距之比(固定)
对旋转周期影响最大的参数是转向角,即前轮在转弯时转动的角度,因为它是可控的。
4.3.1影响四个车轮转动周期的转向角
图6显示,随着转向角的增加,四个车轮的旋转周期之间的差异也会增加。同一侧两个车轮的旋转周期之差称为裕度。增加转向角会从两个方面影响旋转周期。
•增加左侧和右侧边距。
•增加左侧和右侧旋转周期之间的差异。
在TPMS车轮位置GUI中,此裕度显示为左侧和右侧置信度指示器。有关TPMS车轮定位软件图形用户界面(GUI)的说明,请参阅NXP文档ID TPMSWHEELLOCGUIUG。
-4 博主推荐 第1张-齐东汽车电子博客")
如果能够获得旋转方向的信息,区分左侧和右侧不是问题。即使只使用旋转周期,两侧之间的差异始终很大,即使在较小的转向角下也是如此。但仍然有一项任务是区分前轮和后轮。如果双方的边距都很大(大约几十毫秒),这将更容易、更可靠。转向角增大时,更容易区分车轮。
这就是为什么在该算法中,四个车轮的旋转周期会被比较,但前提是转向角超过阈值。通常,该阈值约为10度。除此之外,边缘足够高,能够区分前轮和后轮。低于此阈值时,边缘仅为几毫秒左右,这与噪音水平太接近。
4.3.2影响四个车轮转动周期的车辆宽长比
对车轮旋转周期影响较小的另一个参数是传动比
Track/wheelbase = W/L
对于汽车来说,这个比例通常是0.57左右,宽度=长度✕ 0.57.
-4 博主推荐 第2张-齐东汽车电子博客")
图7中的图表显示,在固定长度L下,当宽度W增大时,左侧和右侧之间的差异增大。考虑到左右两侧转弯半径的差异取决于汽车的宽度,这是有道理的。对于更大/更宽的车辆,假设长度固定,左侧和右侧旋转周期之间的差异更大。
关于这个比率的影响,可以看出,考虑到汽车的标准尺寸,这个比率几乎没有影响。对于W/L=0.52的比率,左前轮(绿色曲线)和右后轮(蓝色曲线)之间的差值为60 ms。然而,对于比率为0.61的汽车,该差值增加到80 ms。因此,比率仅将该差值修改了20 ms。
该参数对同一侧两个车轮之间的旋转周期差没有影响。代表同一侧车轮的曲线似乎是平行的。事实上,两条曲线之间存在微小差异,因此它们不是真正平行的,但差异可以忽略不计。
在讨论了影响车轮旋转周期的参数后,下一节将讨论用于比较这些旋转周期的方法。
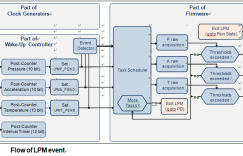
当汽车以3 km/h至30 km/h的低速行驶时,TPMS胎压传感器通过RF信号将其数据发送至RF接收器,算法会连续计算旋转周期以及旋转方向的信息。有关车轮转速比较的更多详细信息,请参阅TPMS车轮位置项目参考手册(NXP文档ID TPMSWHEELLOCPRJRM)。
注:来源于网络整理

{kind=link}