TPMS车轮自动定位算法介绍(NXP)-6
6算法流程-总结和示例
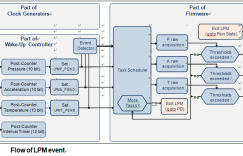
图9总结了RF接收器模块中实现的算法流程。
-6 博主推荐 第1张-齐东汽车电子博客")
为了说明定位胎压传感器并更新其位置和边距所执行的计算,请考虑图10和下面的示例。
-6 博主推荐 第2张-齐东汽车电子博客")
如前一节所述,阈值设置为50。
车辆外侧的车轮比内侧的车轮走得快。在给定一侧,后轮的旋转周期大于同一侧的前轮。
在本例中,为了简化,仅引用了两个标记为AA和BB的TPMS胎压传感器,但对其他两个车轮使用了相同的方法。
•第一个转弯是左转,如果可以访问数据总线,该信息可以从陀螺仪或直接从汽车获取。汽车正在向前行驶,来自重力加速计或汽车报告的信息通知TPMS车辆的移动方向。在转弯结束时,BB的最高平均旋转周期为255 ms,AA的第二高平均旋转周期为250 ms。胎压监测系统推断AA和BB在同一侧,并通过观察它们的旋转方向来验证这一点。
它们都是逆时针旋转的,所以它们确实在同一侧,也就是汽车的左侧。
BB的旋转周期高于AA,因此AA被推断为前轮,BB是后轮,其裕度为5(255− 250 = 5). 可靠性参数尚未达到,算法继续运行,因为5低于裕度阈值。
•第二个转弯结束时,再次左转,车辆仍在向前行驶,AA的最高平均旋转周期为300 ms,BB的第二个最高平均旋转周期为275 ms。根据本次转向的信息,AA的旋转周期高于BB的旋转周期,因此AA现在被推断为后轮,BB是前轮,边缘为25(300− 275 = 25). 接下来,将该数据与之前第一轮的结果进行比较。
胎压监测系统得出结论,车轮之间的余量为5。由于5低于25,第二个转弯处的位置被认为更可靠。通过更新总余量,并考虑到两个回合之间存在矛盾的结果,余量现在是20(25)− 5 = 20). AA的位置是后轮,BB的位置是前轮,余量为20。余量值20低于边距阈值,算法继续运行。
•在第三个转弯结束时,即右转且车辆仍在向前行驶,BB的最低平均旋转周期为260 ms,AA的第二个最低平均旋转周期为300 ms。在这一轮中,AA高于BB,TPMS决定AA为后轮,BB为前轮,余量为40。与之前的结果相比;AA确认为后轮,BB确认为前轮,余量为20(20+40=60)。当60高于边缘阈值时,算法停止,当前位置可靠;AA是左后轮,BB是左前轮。
有关TPMS软件算法的更多信息,请参阅《TPMS算法参考手册》(NXP文档ID TPMSWHEELLOCALGORRM)。
注:来源于网络整理

{kind=link}